I. Järjestelmän yleiskatsaus
1. Hankkeen tausta
Viime vuosina laittomasta tavaraliikenteen ajoneuvojen kuljetuksesta on tullut vakava ongelma, joka vaarantaa maan tieliikenneturvallisuutta. Se ylikuormittaa moottoriteitä ja siltoja, mikä lyhentää huomattavasti teiden ja siltojen käyttöikää; samalla ajoneuvojen turvallisuustekijä heikkenee huomattavasti, mikä aiheuttaa jatkuvasti liikenneonnettomuuksia; se on myös helppo aiheuttaa liikenneruuhkia ja ympäristön saastumista.
Maan hallitukset ovat kaikilla tasoilla jatkuvasti lisänneet toimiaan ylikuormitettujen tieliikenneajoneuvojen liikenteen hallitsemiseksi ja saavuttaneet merkittäviä vaiheittaisia tuloksia. Monimutkaisten sosiaalisten ja taloudellisten tekijöiden vuoksi kansallinen ylikuormituksen havaitsemistilanne on kuitenkin edelleen erittäin vakava, eikä piileviä uudelleenkäynnistyksen vaaroja ole poistettu. Hallinnon tulosten vahvistaminen ja ylikuormituksen havaitsemistyön jatkuva edistäminen on edelleen suuren paineen alla. Siksi ajoneuvojen ylikuormituksen hallinta on pitkäjänteistä ja päivittäistä työtä, jota on jatkettava sinnikkäästi. On ratkaisevan tärkeää sisällyttää ylikuormituksen hallinta pitkän aikavälin mekanismiin. Sillä on myös oikeudellinen pelotevaikutus ylikuormitettuihin ajoneuvoihin, ja sen toimintoja voidaan laajentaa tienvarsitarkastuksiksi, torjua laittomien kuljetusten sattumanvaraisuutta ja valvoa ja poistaa oikea-aikaisesti erilaisia laittomia kuljetustoimintoja, mukaan lukien ylikuormitetut kuljetukset.
2. Punnitusjärjestelmän esittely
Staattisen kuorma-autovaa'an punnitusperiaate on pysäköidä kaikki ajoneuvot punnitusalustalle koko ajoneuvon punnitsemiseksi. Sillä on korkea punnitustarkkuus ja selkeät kansalliset standardit. Perinteinen kuorma-autovaaka voi kuitenkin mitata vain koko ajoneuvon painon, ei akselipainoa. Se voi arvioida, onko koko ajoneuvo ylikuormitettu, mutta ei voi arvioida, onko akselipaino ylikuormitettu. Se ei täytä tiehallinnon vaatimuksia ylikuormitettujen kuljetusten hallinnan saavuttamiseksi.
Tämä suunnitelma yhdistää yrityksemme vuosien kokemuksen ylikuormituksen havaitsemislaitteiden suunnittelusta ja valmistuksesta sekä niiden todellisen käytön maan eri alueilla. Siinä tutkitaan huolellisesti markkinoilla olevien erilaisten ylikuormituksen havaitsemislaitteiden käyttöä ja otetaan kattavasti huomioon tieliikenteen hallintaosastojen erityistarpeet ylikuormitetun liikenteen hallinnassa. Se hyödyntää edistynyttä teknologiaa ja ainutlaatuisia suunnitteluideoita dynaamisen ja erittäin tarkan ajoneuvon painon ja akselityypin havaitsemisjärjestelmän kehittämiseksi. Se voi punnita sekä akselipainon että kokonaispainon ja erottaa akselityypin. Myös akselipainon tarkkuutta voidaan parantaa huomattavasti.
2. Ylikuormitus- ja ylitysjärjestelmän koostumus
1. Järjestelmän ominaisuudet
Se voi punnita hitaasti ohittavia ajoneuvoja ja määrittää automaattisesti, onko ajoneuvon paino tai akselipaino ylikuormitettu;
Se pystyy havaitsemaan ajoneuvon akselien lukumäärän, akseliryhmän, akselipainon ja ajoneuvon painon;
Se voi muodostaa täydelliset ajoneuvon punnitustiedot, mukaan lukien akselityypin, akselipainon, akseliryhmän ja kokonaispainon;
Se voi lähettää punnitustietoja tietokoneelle dataliitännän kautta;
Järjestelmän ydinosa käyttää kypsiä ja luotettavia laitteita, jotka kaikki ovat modulaarisen rakenteensa ansiosta helppoja ylläpitää ja laajentaa, mikä varmistaa järjestelmän korkean luotettavuuden.
Järjestelmäohjelmisto on kypsä ja erittäin luotettava, tiedot ovat täydellisiä ja tehokkaita, ja ne voidaan jakaa täysin, mikä parantaa tehokkaasti työtehokkuutta ja poistaa erilaisia hallinnan porsaanreikiä mahdollisimman paljon.
2. Järjestelmäprosessi
Kuorma-auto ajetaan ylikuormitusaseman punnitusradalle, ja rekisterikilven tunnistusjärjestelmä tunnistaa rekisterikilven numeron;
Renkaan (akselin) tunniste kertoo akselien lukumäärän, ja ajoneuvon punnitusjärjestelmä alkaa punnita, määrittää akseliryhmän ja laskea akselipainon.
Kun kaikki ajoneuvot kulkevat ajoneuvoerottimen läpi ja saapuvat punnitusalustalle ja vaaka on suhteellisen tasapainossa, ajoneuvon kokonaispaino tallennetaan ja akselipaino saadaan.
Punnitusjärjestelmä lähettää punnitustiedot (rekisterikilven numero, akselien lukumäärä, akselipaino, ajoneuvon kokonaispaino jne.) tunnistustietokoneelle. Tietokone määrittää, onko se ylittänyt sallitun painon, ja näyttää tunnistustiedot, kuten ajoneuvon painon, ylityspainon ja ylitysasteen, näytöllä.
Kun ajoneuvo on suorittanut asiaankuuluvat toimenpiteet, ajoneuvon opashenkilöstö vapauttaa ei-ylirajoitetut ajoneuvot poistumaan havaitsemisalueelta näyttöruudun tietojen mukaisesti, ohjaa ylirajoitetut ajoneuvot asema-alueelle käsittelyä varten, tulostaa ylirajoitetun ajoneuvon tarkastuslomakkeen ja suorittaa asiaankuuluvat lataustoiminnot;
3. Järjestelmän kokoonpano ja asettelusuunnitelma
3.1 Järjestelmän kokoonpano
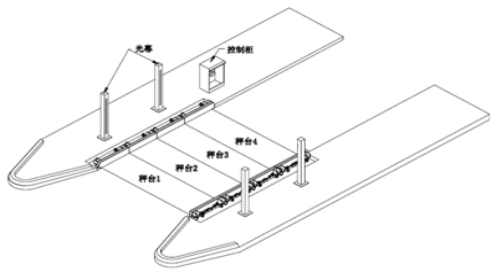
Ylikuormitus- ja ylikuormitusjärjestelmä koostuu ZDG:n nelipöydäisestä dynaamisesta akselivaa'asta, ohjauslaitteesta, infrapuna-ajoneuvoerottimesta, punnitusalustan pyöränakselin tunnistimesta, ohjauskaapista (lisävarusteet: rekisterikilven tunnistusjärjestelmä, LED-suurnäyttöjärjestelmä, äänikehotejärjestelmä, ajoneuvon ohjausjärjestelmä, teollisuustietokone, lipputulostin, UPS-keskeytymätön virransyöttö, ylikuormitus- ja ylikuormitustunnistusjärjestelmän ohjelmisto, valvontajärjestelmä) sekä muista lisävarusteista ja kaapeleista.
3.2 Järjestelmän kaavio, kuten kuvassa näkyy:
Työnkulku:
1) Ajoneuvot ajavat kaistalle peräkkäin pitäen samalla turvallisen etäisyyden, mikä laukaisee infrapuna-ajoneuvojen erottimen;
2) Ajoneuvon jokainen akseli kulkee monitasoisen punnitusalustan läpi;
3) Näytönohjain käsittelee punnitusalustan anturilta ja pyörän anturin signaalista saadun punnitussignaalin, erottelee akselin loogisten ehtojen mukaisesti ja käsittelee tehokkaasti erikoistilanteita;
4) Ajoneuvon takaosa poistuu monipintaisesta punnitusalustasta ja infrapuna-ajoneuvoerottelijasta;
5) Näyttöohjain arvioi kattavasti ajoneuvon loppusignaalin infrapuna-ajoneuvoerottimen havaitseman tukkeutumissignaalin ja punnitusanturin saaman punnitussignaalin perusteella;
6) Näytönohjain käsittelee punnitussignaalin, joka saadaan, kun edellä mainittu ajoneuvo kulkee punnitusalustan läpi;
7) Näyttöohjain muodostaa koko ajoneuvon täydelliset punnitustiedot, ja täydelliset punnitustiedot sisältävät ajoneuvon nopeuden, akselityypin, akselipainon, akseliryhmän painon, kokonaispainon jne.;
8) Punnitse yksi ajoneuvo loppuun ja odota seuraavan ajoneuvon punnitusta.
9) Koko työprosessin ajan järjestelmä käsittelee automaattisesti erilaisia erityistilanteita, kuten täyden sisään- ja uloskäynnin, toistuvan sisään- ja uloskäynnin sekä pitkäaikaisen oleskelun punnitusalustalla;
Järjestelmä pystyy automaattisesti ja tehokkaasti käsittelemään seuraavan ajoneuvon tilanteen, eikä seuraavan ajoneuvon punnitsemisella ole vaikutusta tietojen tarkkuuteen.

Julkaisun aika: 20. helmikuuta 2025