Tieliikenteen kysynnän nopean kasvun myötä ylikuormitetut ajoneuvot aiheuttavat merkittäviä riskejä teille, silloille, tunneleille ja yleiselle liikenneturvallisuudelle. Perinteiset ylikuormituksen hallintamenetelmät eivät pirstaloituneesta tiedosta, heikosta tehokkuudesta ja hitaan reagoinnin vuoksi enää täytä nykyaikaisia sääntelyvaatimuksia. Vastauksena tähän yrityksemme on kehittänytÄlykäs ylikuormituksen hallinnan tietojärjestelmähyödyntämällä tietotekniikkaa, verkostoitumista ja älykkäitä teknologioita keskitetyn tiedonkeruun, dynaamisen hallinnan, reaaliaikaisen vertailun, älykkään analysoinnin ja automatisoidun käsittelyn saavuttamiseksi. Tämä järjestelmä tarjoaa liikenteenhallintaviranomaisille tehokkaita ja tarkkoja työkaluja ylikuormituksen hallintaan, liikenneturvallisuuden ja infrastruktuurin kestävyyden varmistamiseen.
Järjestelmämme on suunniteltu kansallisella tasolla ja se muodostaa kattavan, täysipäiväisen, koko ketjun ja koko alueen kattavan ylikuormituksen hallinta- ja valvontarakenteen. Se mahdollistaa yhteenliittämisen ja tiedon jakamisen lähdeasemien, kiinteiden teiden, liikkuvan tievalvonnan ja kansallisen keskusvalvontakeskuksen välillä muodostaen täyden prosessin sääntelymallin lähdekuormituksesta teiden toimintaan ja valvontaan. Teknologisen seurannan, datayhteistyön ja suljetun kierron valvonnan avulla järjestelmä hallitsee tehokkaasti ylikuormitusta sen lähteellä, varmistaa, että tiet pysyvät käyttöiän pituisina, edistää säänneltyä ajoneuvojen toimintaa ja oikeudenmukaisia tietulleja sekä turvaa liikenneinfrastruktuuria ja kansallisia etuja.
Kokonaisjärjestelmä koostuu neljästä päätoiminnallisesta moduulista: lähdeaseman ylikuormituksenvalvontajärjestelmästä, kiinteästä teiden ylikuormituksenvalvontajärjestelmästä (valtatiet + kansalliset, maakunnalliset, kunnalliset ja maakunnalliset tiet), liikkuvasta teiden ylikuormituksenvalvontajärjestelmästä ja tietullien hallintajärjestelmästä. Nämä moduulit toimivat koordinoidusti luodakseen kattavan valvontajärjestelmän, joka kattaa koko tieverkon ja kaikki skenaariot.
Osa yksi: Lähdeaseman ylikuormituksen hallintajärjestelmä
Lähtöaseman ylikuormituksenvalvontajärjestelmän ensisijainen tavoite on vähentää tai poistaa ylikuormitettujen ajoneuvojen poistuminen lähtöasemilta. Keskeisiä kohteita ovat kaivoksilta, satamista, lentokentiltä, logistiikkakeskuksista, tehtaista ja kuljetusyrityksistä tulevat ajoneuvot. Jatkuva 24/7-valvonta varmistaa, että ajoneuvot noudattavat lastausmääräyksiä lähtöpaikalla.
1. Kahdeksan alustan dynaaminen ajoneuvon punnitusjärjestelmä
Valvottujen kohteiden poistumistiloissa otetaan käyttöön kahdeksan alustan dynaaminen ajoneuvojen punnitusjärjestelmä, joka havaitsee tarkasti ajoneuvojen ylikuormituksen ennen niiden pääsyä julkisille teille. Järjestelmä koostuu seuraavista osista:
Kahdeksan alustan elektroninen ajoneuvovaaka– Käyttää tarkkoja kuormituskennoja, akselien lukumäärän ja etäisyyden tunnistusta, ajoneuvon mittojen mittausta ja optista rasterierottelua ajoneuvon painon ja koon dynaamiseen havaitsemiseen.
Miehittämätön punnituksenhallintajärjestelmä– Sisältää teollisuustietokoneita, punnituksenhallintaohjelmistoja, valvontakameroita, LED-näyttöjä, ääniopastuksia, älykkäitä ohjauskaappeja ja verkkojärjestelmiä ajoneuvojen automaattiseen tunnistamiseen, tiedonkeruuseen, ylikuormitustilan määrittämiseen ja vapautusten hallintaan.
Operatiivinen työnkulku: Ajoneuvot saapuvat punnitusalueelle lastauksen jälkeen. Järjestelmä mittaa automaattisesti painon ja mitat ja vertaa niitä hyväksyttyihin kuormarajoituksiin. Vaatimustenmukaiset ajoneuvot vapautetaan automaattisesti, kun taas ylikuormitettujen ajoneuvojen on purettava lasti, kunnes ne täyttävät standardit. Järjestelmä integroituu alueellisten viranomaisten alustoihin mahdollistaen tiedon jakamisen ja etävalvonnan, mikä varmistaa reaaliaikaisen näkyvyyden lähteen ylikuormituksen hallintaan.
2. Ajoneuvon sisäinen punnitusjärjestelmä
Dynaamisen valvonnan tehostamiseksi ajoneuvot on varustettu ajoneuvon omalla punnitusjärjestelmällä, joka pystyy valvomaan ajoneuvojen staattisia ja dynaamisia kuormia reaaliajassa. Järjestelmään kuuluu ajoneuvon punnitusohjelmisto, älykkäät näytöt ja punnitusyksiköt (laseretäisyys- tai venymäliuskatyyppiset), joiden avulla kuljettajat voivat tarkastella kulloistakin kuormaa ja saada varoituksia lastauksen aikana. Ylikuormitettuja ajoneuvoja kehotetaan purkamaan kuorma, ja tiedot ladataan samanaikaisesti kalustonhallintajärjestelmiin ja viranomaisjärjestelmiin. Tarvittaessa ylikuormitusilmoitukset tai sakot luodaan automaattisesti.
Järjestelmä käyttää jousituksen voima-antureita lehtijousien, akseleiden tai ilmajousitusten muodonmuutosten valvontaan ja soveltaa suljetun silmukan "tunnista–kalibroi–laske–käytä" -menetelmää kuormitusmallien rakentamiseen. Ohjelmistoalgoritmit kompensoivat ympäristötekijöitä varmistaen mittaustarkkuuden. Staattisen punnituksen tarkkuus on ±0,1–±0,5 %, kun taas epäsuoran punnituksen tarkkuus on ihanteellisissa olosuhteissa ±3–±5 %, mikä soveltuu toiminnan hallintaan ja riskihälytyksiin.
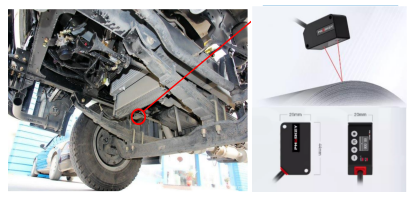
Jousitettuun runkoon asennettu muodonmuutoslasermittausjärjestelmä

Jousituksen kiinnittämän rungon muodonmuutosPunnituskenno
Yhdistämällä kahdeksantasoisen dynaamisen ajoneuvojen punnitusjärjestelmän ajoneuvoon asennettuun punnitusjärjestelmään ajoneuvot voivat suorittaa itsetarkastuksen, kalustot voivat tehdä itsetarkastukset ja viranomaiset voivat valvoa koko prosessia. Tämä luo täysin integroidun, reaaliaikaisen ylikuormituksen hallintamallin, joka varmistaa liikenneturvallisuuden ja infrastruktuurin pitkän aikavälin vakauden.
Julkaisun aika: 09.12.2025